
El Instituto de Arquitectura Avanzada de Cataluña (IAAC) con sede en Barcelona ha creado tres pequeños robots móviles, denominados ‘Minibuilders‘ en el que pueden imprimir cualquier estructura en proceso continuo, capa tras capa de cualquier tamaño en conjunto.
El objetivo de la IAAC ha sido desarrollar una familia de robots de construcción a pequeña escala, todos móviles y capaces de construir objetos mucho mayores que los propios robots. Cada uno de los robots desarrollados tenía que realizar una tarea diversa, ligada a las diferentes fases de la construcción, obteniendo un único resultado estructural. Por lo tanto, en lugar de una máquina de gran tamaño, se optó por un número de robots mucho más pequeñas que trabajan de forma independiente y coordinados pudiendo realizar una gran estructura.
El primer robot construye las 20 primeras como base, un segundo robot realiza las tareas de sujeción construyendo el resto de la estructura de la estructura y, por último, un robot de succión recorre la estructura añadiendo capas de refuerzo donde sea necesario.

Cada robot está vinculado a sensores y un sistema de posicionamiento local, que se alimentan de datos en vivo a un software personalizado y permite al operador controlar el movimiento de los robots. Los robots se suministran con material a través de tubos de un robot de suministro adicional, que puede seguirlos alrededor de la estructura cuando se necesite.
ROBOT BASE

Realiza una trayectoria predefinida de las primeras 20 capas de forma continua del material, ya que cuenta con unos sensores montados dentro de la dirección de control de robot, siguiendo un camino predefinido en espiral y puede ajustarse la altura de la boquilla para una capa suave y continua, en espiral.
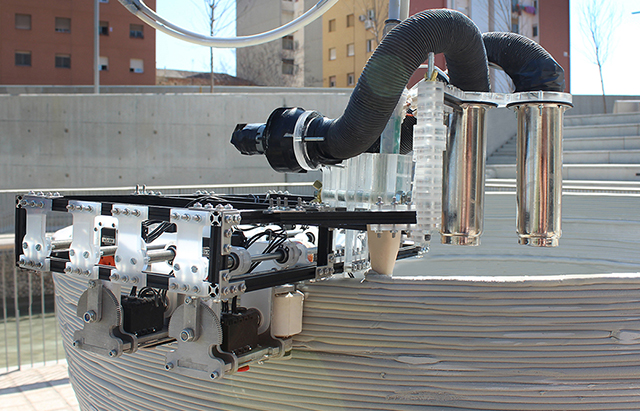
ROBOT DE SUJECIÓN

El segundo robot con sus cuatro rodillos de fijación en el borde superior de la estructura, permite que se mueva a lo largo del material impreso previamente, depositando más capas. Además incluye calentadoeres para acelerar el proceso de curado, fraguando antes y solidificándose más rápido para que sea lo suficientemente fuerte para que soporte el robot sobre las salientes del material.Todo ello es controlado por el software a medida que el robot sigue una trayectoria predefinida, sino que también puede ajustar su trayectoria para corregir errores en el proceso de impresión contando con actuadores rotacionales de control de altura para mantener una capa consistente
ROBOT SUCCIÓN
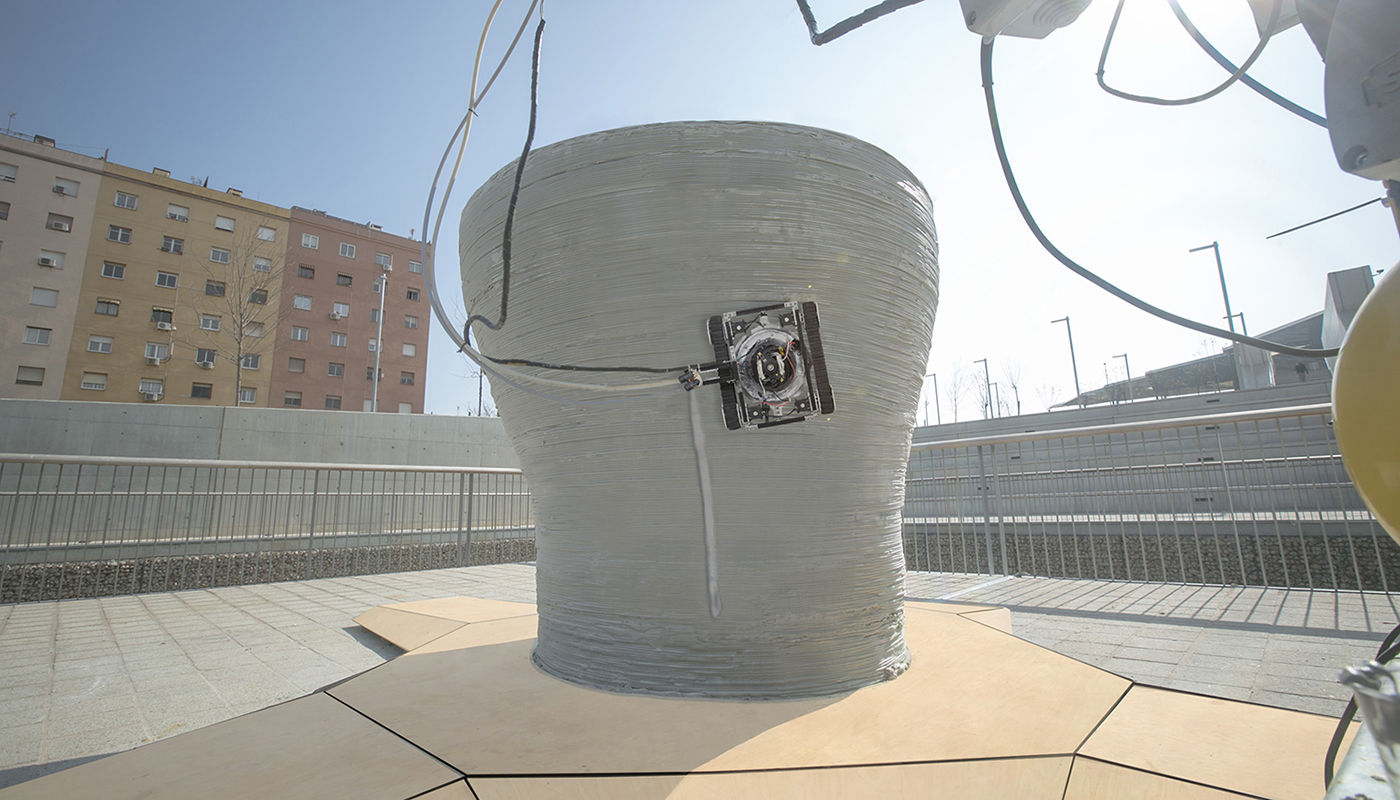
Este robot se adhiere a la superficie de la estructura impresa previamente y se mueve libremente depositando material sobre la superficie y mejorando las propiedades estructurales. Esta tarea puede ser realizada por un robot, o un enjambre de robots que trabajan en coordinación.
Comments (1)
adeluna100 - 1 abril, 2016
Mil gracias por la información.