Calcular un pilote ante una carga estática de compresión en cabeza es fácil, solo ha de cumplirse que el cociente entre la carga de hundimiento Qh y la carga de compresión actuante sobre el pilote Q, sea mayor que un cierto valor denominado coeficiente de seguridad:
Calcular un pilote ante una carga estática de tracción en cabeza es igualmente sencillo. De la misma manera, hay que comprobar que la carga de arranque Taentre la carga de tracción actuante sobre el pilote Q, sea mayor que un mínimo coeficiente de seguridad:
Me guardo para un futuro post un compendio de las diferentes normativas que hay en España (CTE, Guía de Cimentaciones de Carretera y ROM) para calcular estas Qh y Ta y saber qué coeficientes de seguridad hay que tener en cuenta.
Para este post voy a exponer cómo proceder cuando además de una carga Q en cabeza del pilote tenemos un incremento de carga ΔQ cíclica, es decir, a veces tenemos Q+ΔQ y otras veces Q-ΔQ (en número de ciclos grande, claro).
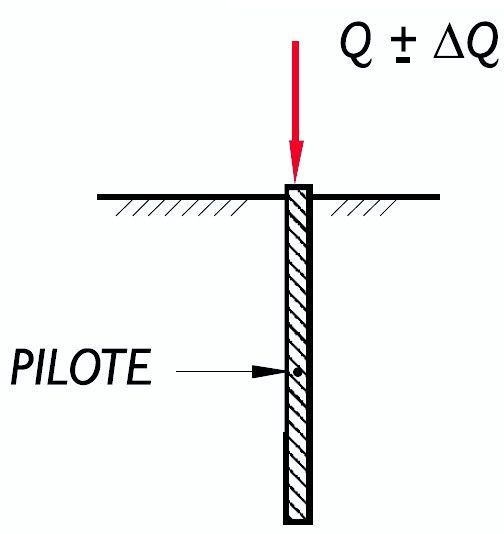
Éste fenómeno se suele dar en obras marítimas donde las cargas suelen venir por acciones marítimas con un marcado efecto cíclico o bien en cimentaciones de maquinaria donde las cargas variables son cíclicas y elevadas respecto a las permanentes. Para ello, voy a describir un método recogido en la ROM 0.5-05.
Como parece lógico, no basta comprobar el pilote ante una carga Q+ΔQ y otra carga Q-ΔQ pues el efecto cíclico de las acciones produce cambios significativos en la capacidad de carga del pilote, mayor cuando realmente se produce cambio de signo en la acción aunque tampoco despreciable cuando no se llega a producir ese cambio de signo.
El método propuesto por la ROM consiste en considerar el siguiente diagrama de interacción entre la parte de la carga permanente del pilote Q y la parte de la carga cíclica del pilote ΔQ:
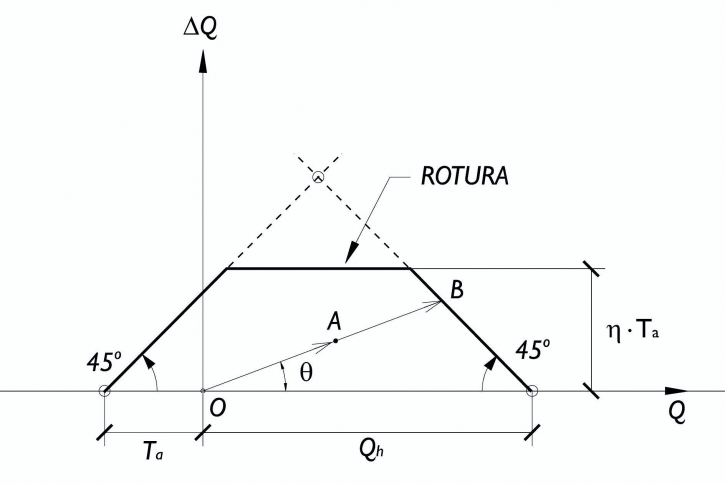
De esta manera, para la comprobación de un pilote A sometido a una situación de carga Q±ΔQ, bastará con ver su situación en el diagrama posicionando el punto A (Q,ΔQ) y comprobar que el coeficiente de seguridad definido como:
Cumple con los coeficientes de seguridad mínimos exigidos por normativa.
En el diagrama de interacción anterior Qh es la carga de hundimiento estática, Ta es la resistencia al arranque estática y el valor de η viene dado por:
 Donde:
Donde:
α = relación entre la resistencia por punta y por fuste en el hundimiento en condiciones estáticas:
β = relación que existe entre el peso efectivo enterrado del pilote y la resistencia al arranque:
Para los que quieran evitar realizar el diagrama anterior para calcular el coeficiente de seguridad, de forma aproximada se pueden considerar tres regiones en el diagrama y proceder de la siguiente manera:
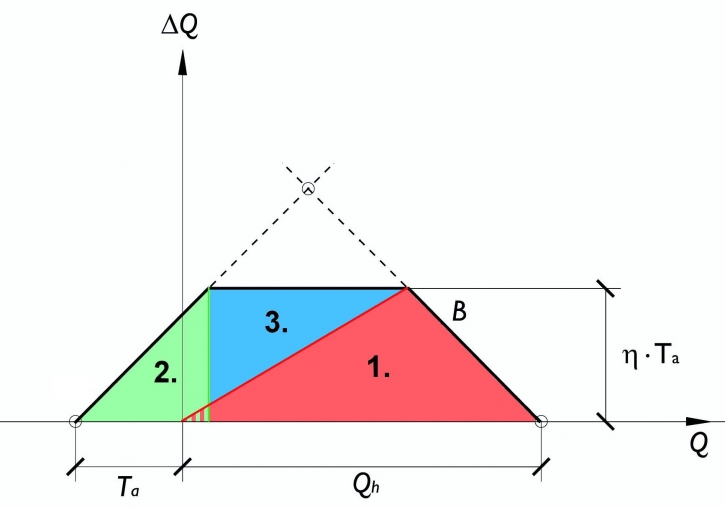
REGIÓN 1: Zona de compresión alta
Esta situación ocurre cuando:
Es la región colorada en el diagrama anterior. En este caso no hace falta considerar el carácter cíclico de la acción pues de forma aproximada basta con comprobar que el pilote con una carga Q+ΔQ cumple con el coeficiente de seguridad mínimo de hundimiento.
REGIÓN 2: Zona de compresión baja o tracción
Esta situación ocurre cuando:
Es la región verde en el diagrama anterior. En este caso, tampoco hace falta considerar el carácter cíclico de la acción pues de forma aproximada basta con comprobar que el pilote con una carga Q-ΔQ cumple con el coeficiente de seguridad mínimo de arrancamiento.
REGIÓN 3: Zona intermedia.
Cuando no se cumplen las dos condiciones anteriores. Es la zona azul en el diagrama, donde el carácter alternante de la carga es dominante. De maneraaproximada, el coeficiente de seguridad viene dado por:
Para más información podéis acudir a la fuente: ROM-0.5-05 (en la zona de descargas podéis bajárosla) y en H.G. Poulos “Marine Geotechnics”. Chaman and Hall. 1988.
SUMINISTRADO:
El articulo que observo fue suministrado por la siguiente pagina, para mayor información contacte la misma:
- Pagina: estructurando.net
Created By: Ing. Nestor Luis Sánchez – Tw:
@NestorL
Comments (1)
alejandro velez - 30 junio, 2016
que buen aporte muchas gracias